MS in Computational Design | Insects and Robots (Collaborators: Sampada Acharya , Felipe Borja, Tuo Wang, Willa Yang)
Carnegie Mellon University
Contribution: Initial concept, form testing, acutation system design, fabrication and implementation.
Tags: Robotics
Advancements in bio-inspired robots have
demonstrated extraordinary capacity to tackle locomotion problems. In dealing
with complex terrains, the application of multimodal principles has shown
versatility and flexibility in locomotion as the robot can better adapt to
different terrestrial conditions. This project aims to design and fabricate
exoskeleton mechanisms that allow a robot to mimic the curl and uncurl motions,
referred to as conglobation, of pill bugs. Pill bugs use this trait to great
effect in adjusting to their dynamic environments, and robots could benefit
from such adaptability. The proposed mechanisms will allow a robot to switch
between crawling and rolling modes for adaptive locomotion, easier
transportation, and better protection of the robot body.
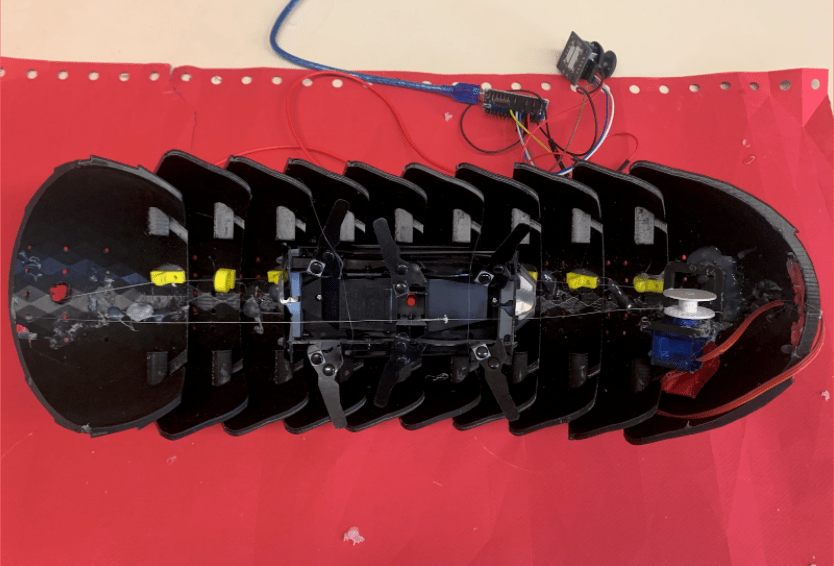
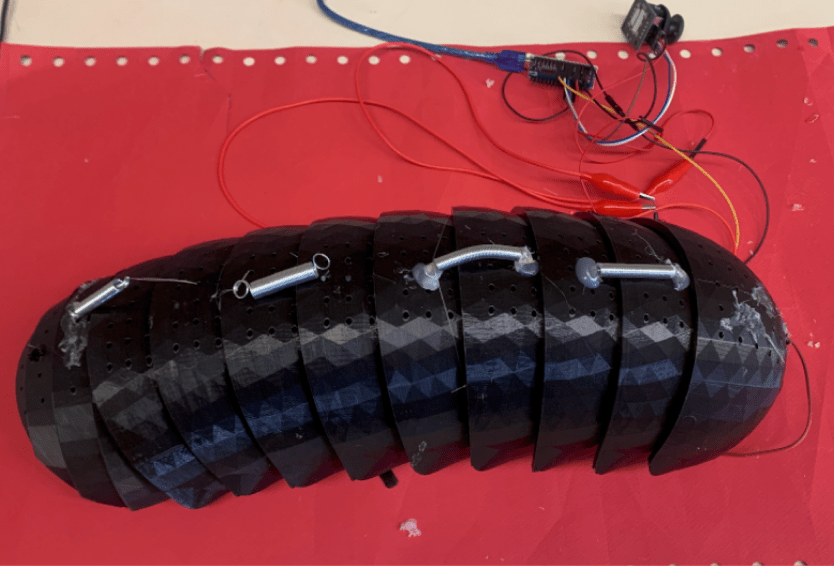
In this project, we primarily focus on designing and fabricating an exterior shell inspired by pill bugs’ exoskeleton. Specifically, we want to design a hierarchical shell structure that can change between flat and spherical configurations. The major problems are listed in a tree diagram.
In addition, our design should satisfy the following requirements:
● As we use an existing robot (about 20cm x10cm x10cm), our exoskeleton design should be compatiblewith our base robot’s dimensions.
● The exoskeleton should be able to expand to a spherical shape in two degrees of freedom.
● The resulting spherical robot should be able to roll if actuation is added.
![]()
![]()
![Shell Form Design and Motion Design]()
![]()
In this project, we primarily focus on designing and fabricating an exterior shell inspired by pill bugs’ exoskeleton. Specifically, we want to design a hierarchical shell structure that can change between flat and spherical configurations. The major problems are listed in a tree diagram.
In addition, our design should satisfy the following requirements:
● As we use an existing robot (about 20cm x10cm x10cm), our exoskeleton design should be compatiblewith our base robot’s dimensions.
● The exoskeleton should be able to expand to a spherical shape in two degrees of freedom.
● The resulting spherical robot should be able to roll if actuation is added.